|
|
Last edited by hbghlyj at 2024-11-28 17:30:00高观点下的初等数学2-【德】菲利克斯·克莱因. 第十章 作为相对量的线段、面积与体积 第11页
现在从多边形转到具有曲线边界图形的面积。我们将考虑任何封闭曲线,包括它可以与自己相交任意次数。我们指定一个沿此曲线的确定方向, 并考虑由此曲线所包围的面积。如果通过不断增加边数并缩短边长使折线逼近曲线 (图 10.14), 用我们刚才说明的方法求出这些多边形的面积并过渡到极限,自然而然就找到其面积。如果
$P(x, y)$ 和 $P_{1}(x+\mathrm{d} x, y+\mathrm{d} y)$
是这样一个逼近多边形的两相邻顶点, 则其面积为基本三角形 $\left(O P P_{1}\right)$ 面积, 即
$$
\frac{1}{2}\left|\begin{array}{ccc}
0 & 0 & 1 \\
x & y & 1 \\
x+\mathrm{d} x & y+\mathrm{d} y & 1
\end{array}\right|=\frac{1}{2}(x \mathrm{~d} y-y \mathrm{~d} x)
$$
的和。过渡到极限, 此和化为沿此曲线的线积分
$$
\frac{1}{2} \int(x \mathrm{~d} y-y \mathrm{~d} x)
$$
因此, 此积分也就确定了由曲线所包围图形的面积。如果希望解释此定义的几何意义, 可将刚才对多边形所得到的结果应用到新的情况: 当给定的曲线按指定的方向走过一次时, 每一个被曲线包围的部分区域的面积按其沿逆时针方向被包围的次数计算正倍数, 而按顺时针方向被包围的次数计算负倍数。对如图 10.14 所示的简单曲线,积分相应地给出由曲线包围区域的取正号的面积。对图 10.15 的情况, 外面部分按正号计算一次,里面部分则计算两次。在图 10.16 中, 左部是负的而右部是正的, 故计算结果为负。在图 10.17 中,一部分根本没有计算, 因为它按正向和负向各被包围一次。当然, 按这里的意义, 可能出现这样的曲线, 其包围的面积为零。如果在图 10.16 中使曲线相对其交点对称, 就得到这样的曲线。只要记得我们是按一个方便的假定来确定面积的, 那么这种情况就不足为奇了。
现在向你们指出, 使用安姆斯拉 (Amsler) 极性求积仪, 可见这些定义是多么恰当。这个极精巧而有用的工具是 1854 年由德国技工雅哥比·安姆斯拉 (Jacob Amsler)制造的。用这个工具测定的面积, 正好是上面讨论中所说的面积。让我们首先考虑这个仪器的理论基础。
设想一条长为 $l$ 的棒 $A_{1} A_{2}$ (图 10.18) 在平面上移动, 使得 $A_{1} A_{2}$ 画出分离的封闭曲线, 而棒本身返回到原来的位置。我们希望求出棒所扫过的面积, 把这个面积的若干部分按扫过的方向不同而以正或负计算。为此, 代替棒的连续移动我们使棒从一个位置 12 到一个邻近位置 $1' 2'$ 经任意小的逐次基本移动, 以及在积分中所用的极限过程。棒所扫过的实际面积, 为这些移动所形成的 “基本四边形” $\left(1,1', 2', 2\right)$ 面积的和的极限。很容易看到, 对应于 $1,1', 2', 2$ 的巡回方向, 为每个基本四边形面积给出符号, 也就把棒的移动方向适当地考虑进去了。现在, 可以把棒 $A_{1} A_{2}$ 的每个基本移动分解为 3 步(图 10.19):
(1) 沿棒所在方向平移 $\mathrm{d} s$ 。
(2) 沿棒的垂直方向平移 $\mathrm{d} p$ 。
(3) 绕端点 $A_{2}$ 旋转角度 $\mathrm{d} \varphi$ 。
 drawing-5.svg
(2.49 KB, Downloads: 59)
drawing-5.svg
(2.49 KB, Downloads: 59)
图 10.19按此方法, 要分别扫过面积 $0 \cdot \mathrm{d} s, l \cdot \mathrm{d} p, \frac{l^{2}}{2} \mathrm{~d} \varphi$。可以用这 3 个面积的和来代替基本四边形的面积, 因为这样造成的误差是一个高阶无穷小, 过渡到极限 (实际上是一个简单的积分过程) 则将消失。关键的是注意这个和。如果沿逆时针方向测 $\mathrm{d} \varphi$ 为正, 且绕 $\varphi$ 增加的平移 $\mathrm{d} \varphi$ 为正, 则
$$
l \cdot \mathrm{d} p+\frac{l^{2}}{2} \mathrm{~d} \varphi
$$
与四边形 $\left(1,1', 2', 2\right)$ 的面积符号一致。
沿移动的路径积分, 得到 $A_{1} A_{2}$ 扫过的面积为
$$
J=l \int \mathrm{d} p+\frac{l^{2}}{2} \int \mathrm{d} \varphi
$$
积分 $\int \mathrm{d} \varphi$ 表示棒对于其原来位置所转过的总角度。因为棒回到原来位置, 除非做了一个完全的旋转, 否则 $\int \mathrm{d} \varphi=0$, 于是面积为
$$\tag1\label1
J=l \int \mathrm{d} p
$$
但是, 通过适当选择 $A_{1}$ 和 $A_{2}$ 的路径, 棒在回到原来位置之前, 是有可能作一次或多次完全旋转的, 于是, $\int \mathrm{d} \varphi$ 是 $2 \pi$ 的倍数。对\eqref{1}式右端, 相应于正向和反向的一个完全旋转, 得加上 $+\pi l^{2}$ 或 $-\pi l^{2}$ 。为简单起见, 我们把这个稍微复杂一点的情况放在一边。
drawing-6.svg
(2.52 KB, Downloads: 57)
图10.20现在可以用稍微不同的方法来确定面积 $J$ (图 10.20)。在逐次的基本移动中, 设棒依次取得位置 $12,1' 2', 1'' 2'', \cdots$, 则 $J$ 是这些基本四边形面积之和:
$$
J=\left(1,1', 2', 2\right)+\left(1', 1'', 2'', 2'\right)+\left(1'', 1''', 2''', 2''\right)+\cdots
$$
说得精确一点, 是代表这个和式极限的积分, 而这里所指的每个四边形环绕的方向和前面所说的一样。利用前边的多边形的公式, 其中 0 为任意选定的坐标原点, 我们有
$$
\begin{aligned}
J=&\left(0,1,1'\right)+\left(0,1', 2'\right)+\left(0,2', 2\right)+(0,2,1) \\
&+\left(0,1', 1''\right)+\left(0,1'', 2''\right)+\left(0,2'', 2'\right)+\left(0,2', 1'\right) \\
&+\left(0,1'', 1'''\right)+\left(0,1''', 2'''\right)+\left(0,2''', 2''\right)+\left(0,2'', 1''\right) \\
&+\cdots,
\end{aligned}
$$
其中每一行的第二个三角形与下一行的第四个三角形一样,但环绕的方向相反
$$
\left(0,1', 2'\right)=-\left(0,2', 1'\right),\left(0,1'', 2''\right)=-\left(0,2'', 1''\right), \cdots
$$
所以这些被加项全部抵消。又因为这些基本四边形系列是闭合的, 被加项 $(0,1,2)$ 将会出现在最后一行而与第一行的 $(0,2,1)$ 相抵消, 于是每一行中只留下第一、第三两个三角形。但按前面讲的, 第一个三角形面积之和为多边形 $\left(1,1', 1'', \cdots\right)$ 的面积, 过渡到极限, 即为棒的端点 $A_{1}$ 所画曲线包围的面积 $F_{1}$。类似地, 如果逐项改变符号, 第三个三角形面积之和为多边形 $\left(2,2',2'', \cdots\right)$ 的面积, 过渡到极限, 即为 $A_{2}$ 所画曲线包围的面积 $F_{2}$ 。于是有
$$\tag2\label2
J=F_{1}-F_{2}
$$
显然, 只要注意考虑我们的符号规则来确定 $F_{1}$ 和 $F_{2}$, 两曲线可任意地相交。
上述求积仪的几何原理, 就包含在\eqref{1}式和\eqref{2}式里。即: 如果使 $A_{2}$ 沿一个已知面积 $F_{2}$ 的曲线移动, 而在 $A_{1}$ 处的轨迹点使其沿 $F_{1}$ 的边界移动, 并有一个仪器使我们能测量 $\int \mathrm{d} p$, 则可立即求得值
$$\tag{$2'$}\label{$2'$}
F_{1}=F_{2}+l \int \mathrm{d} p
$$
安姆斯拉所造的仪器就是这样的一个装置。他在作为轴的棒 $A_{1} A_{2}$ 上固定一个轮子, 随棒的移动而在纸上滚动。
cjhb.svg
(7.29 KB, Downloads: 86)
图10.21这是他的机械发明的第二部分。设轮子半径为 $\rho$, 距离 $A_{2}$ 为 $\lambda$ (图 10.21)。轮子随棒移动而滚动过的角 $\psi$ 是各个基本移动中滚过角 $\mathrm{d} \psi$ 的和, 每个 $\mathrm{d} \psi$ 可以由 3 个滚动角 $\mathrm{d} \psi_{1}, \mathrm{~d} \psi_{2}, \mathrm{~d} \psi_{3}$ 组成, 每一个滚动角各自对应于前面所分解成的 3 个简单移动。在第一步移动中, 轮子不转, 故 $\mathrm{d} \psi_{1}=0$; 在第二步, 棒 $A_{1} A_{2}$ 沿其垂直方向移动 $\mathrm{d} p$ 时, 轮子在纸上转过距离 $\mathrm{d} p=\rho \mathrm{d} \psi_{2}$, 故 $\mathrm{d} \psi_{2}=\frac{\mathrm{d} p}{\rho}$;第三步, 棒环绕 $A_{2}$ 转过角 $\mathrm{d} \phi$, 轮缘转过距离 $\lambda \mathrm{d} \phi=\rho \mathrm{d} \psi_{3}$, 故 $\mathrm{d} \psi_{3}=\frac{\lambda}{\rho} \mathrm{d} \phi$。于是有
$$
\mathrm{d} \psi=\frac{1}{\rho} \mathrm{d} p+\frac{\lambda}{\rho} \mathrm{d} \phi
$$
如果 $A_{1} A_{2}$ 回到原来位置的过程中不作完全旋转, 则沿整个移动路径积分之, 有: $\int \mathrm{d} \phi=0$ 。于是, 安姆斯拉轮子的全部转动角将是
$$\tag3\label3
\psi=\frac{1}{\rho} \int \mathrm{d} p
$$
但如果棒作了一次或多次旋转, 则在右侧将出现 $2 \pi \frac{\lambda}{\rho}$ 的某个倍数。但我们仍不考虑此种情况。
联合\eqref{$2'$}式与\eqref{3}式,最终得到
$$
F_{1}-F_{2}=l \cdot \rho \cdot \psi,
$$
即由轮子转过的角 $\psi$ 可测量出棒的两端所迂回包围面积之差。
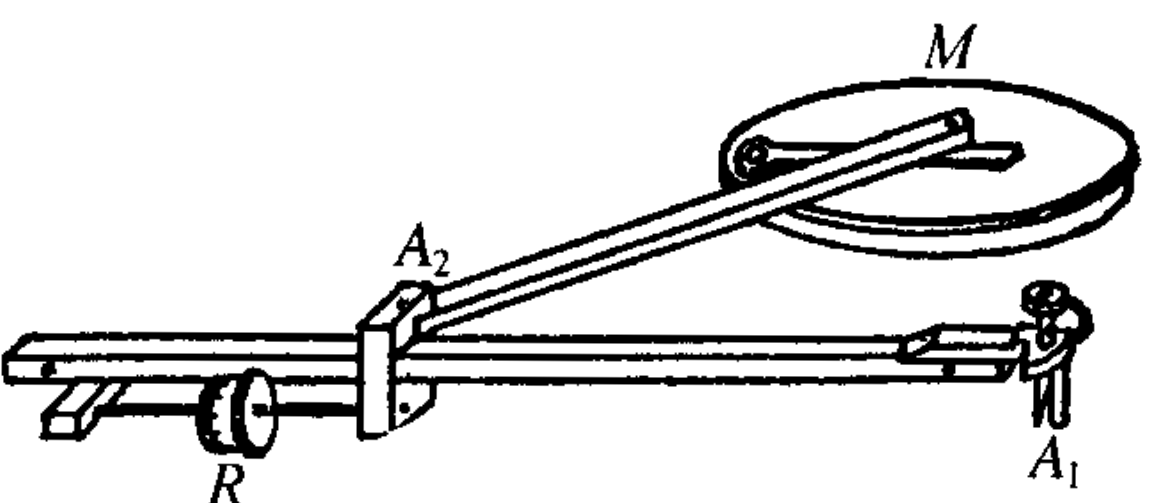
在制作此仪器时, 使 $F_{2}$ 为零是可取的。安姆斯拉用一个聪明的方法把 $A_{2}$ 附在一个绕固定点 $M$ 转动的臂上 (图 10.22)。于是 $A_{2}$ 只能在臂上沿弧作来回移动而不会包围任何圆面积, 如果我们不考虑 $A_{2}$ 绕 $M$ 作一次或多次完全的转动这个复杂的可能性的话。由于有这个 “极点” $M$, 整个仪器常常被称为极性求积仪。这个仪器的实际操作是在 $A_{1}$ 处装一个标记用铅笔, 使其沿希望测量的面积的图形边界移动一周, 然后读出轮子转过的角 $\psi$, 从而求得被包围的面积为 $F_{1}=l·\rho \psi$。仪器的常数 $l \cdot \rho$ 可以通过测量已知面积例如单位正方形而求得。
这里向你们介绍一个极性求积仪的图形(图10.23)。当然,你们必须亲自去看一下,如果想完全了解它,最好去用一用。自然,如果要使仪器可靠地运行,制作方式必须比理论讨论中所说的要稍复杂。在这一方面,我还想多说几句。点 $M$ 用一个重物带着,并用一个杆与 $A_2$ 连接起来。我们谈到过的,在理论上有重要意义的棒 $A_1A_2$, 并不是你们在仪器上所看到的第二条金属杆,而是作为轮子轴的理想延长线,它与杆平行,并通过移动的铅笔点 $A_1$。这个尖点,用一个平行的钝的木钉带着,使点 $A_1$ 不致把纸撕坏。轮子上带有一个可读到好几位数的游标尺和一个记录圈数的计数器。
我不再详谈了,只想提出一个一般的警告:为了说明某一理论而考虑这类仪器时,不可忽略它们的实用情况。纯数学家常常容易忽略这一面,正好像只埋头于制作仪器而对理论没有兴趣的机械师走另一极端一样,都是片面的。应用数学应该把两者结合起来。特别是应该考虑到,理论原侧在仪器上是绝不能严格实现的,如仪器的连接处总有一些松动,轮子转动时总会有些滑动,画图纸不会是一个均匀平面,且铅笔不可能绝对沿曲线移动。误差多大是严重的,轮子读数的多少是可靠的等等,当然是实用中的重要问题。研究这些问题是应用数学的领域。 |
|






![Planimeter[1].jpg](data/attachment/forum/202208/22/232547uxjmx12gimk2irm9.jpg "Planimeter[1].jpg")