|
|
ams.org/publicoutreach/feature-column/fc-2013-03
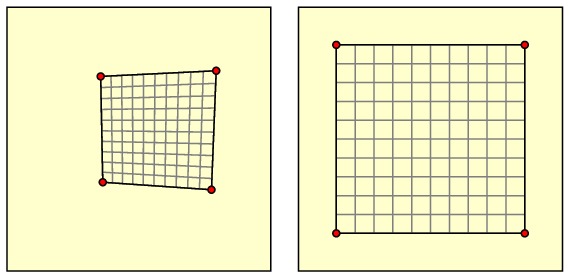
假设你想给这张平面拍照,
它在三维空间中。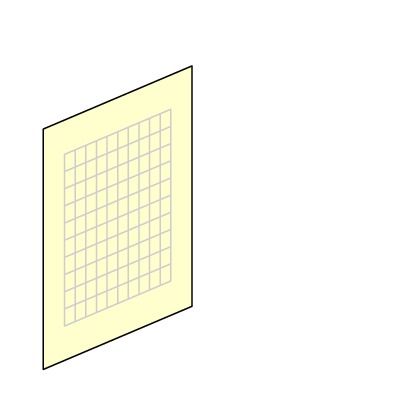
如果相机与平面恰好对齐,
那么图像将被均匀地缩放。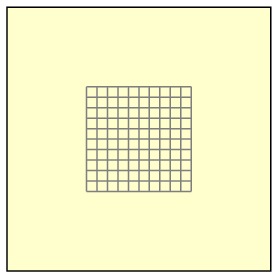
但是,如果相机的平面不平行于图像的平面,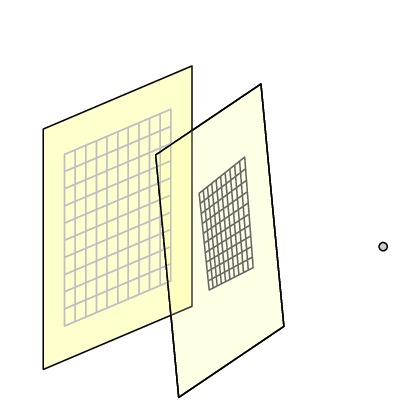
那么平面的图像会被扭曲。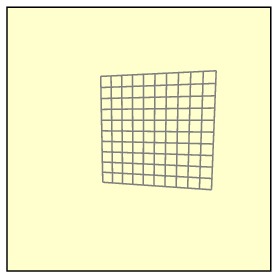
我们的目标是从相机记录的失真图像重建原始图像。
首先,我们将描述将一个平面投影到另一个平面的变换。 我们是考虑从平面到相机平面上的投影,还是从相机平面到原始平面的逆投影,这一点是无关紧要的。

假设我们将点 ${\bf p}$ 投影到方程 ${\bf n}\cdot {\bf x} = C$ 所描述的平面上。 下图显示了这个问题的二维版本。
我们将通过点 ${\bf p}$ 和眼睛$\bf eye$的直线上的点参数化为 ${\bf r} = (1-t){\bf p} + t{\bf eye}$ ,并询问何时该点位于平面${\bf n}\cdot {\bf x} = C$上。 $${\bf n}·\Big((1-t){\bf p} + t{\bf eye}\Big)=C$$ $${\bf n}·\Big((1-t){\bf p} + t{\bf eye}\Big)=C$$
解得 $$ t = \frac{C-{\bf n}\cdot {\bf p}}{{\bf n}\cdot{\bf eye} -{\bf n}\cdot {\bf p}}, $$
因此 $$ {\bf r} = \frac{{\bf n}\cdot{\bf eye} - C}{{\bf n}\cdot{\bf eye}-{\bf n}\cdot { \bf p}} {\bf p} + \frac{C- {\bf n}\cdot{\bf p}}{{\bf n}\cdot{\bf eye} - {\bf n}\cdot {\bf p}} {\bf eye} $$
如果写出平面上的坐标,就会发现函数的形式为 $$ (x,y)\mapsto(u,v) = \left(\frac{ax+by+c}{gx + hy + j }, \frac{dx + ey + f}{gx+hy+j}\right).$$
 给定我们的两张图像,我们将选择失真图像中的四个点和校正图像中的四个对应点,并从这些数据中重建函数。 给定我们的两张图像,我们将选择失真图像中的四个点和校正图像中的四个对应点,并从这些数据中重建函数。
这个函数,称为射影变换。 尽管分量是有理函数,但分子和分母只是线性的。 出于这个原因,很自然地将这个函数重新定义为射影平面的变换,所谓射影平面就是${\bf R}^3$ 中穿过原点的直线的集合。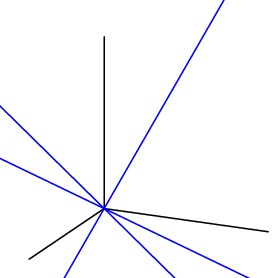
通过将欧氏平面置于 ${\bf R}^3$ 内作为平面 $z=1$,并将每一点对应到经过它和原点的直线,我们建立了从欧几里得平面到射影平面的一个嵌入,因为一条线与平面 $z=1$ 相交至多一点。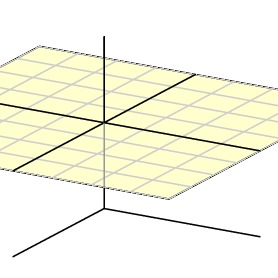 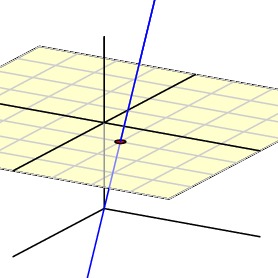
射影平面中的点使用齐次坐标来描述,我们将投影平面中的一条线表示为 $[x,y,z]$,其中 $(x,y,z)$ 是线上的一个点。请注意,$(x,y,z)$ 的任何标量倍数也是这条线上的一个点,即,仅相差标量倍数的两个点对应的齐次坐标是相同的。也就是说,$[x,y,z] = [wx,wy,wz]$。
请注意,欧几里得平面中的点形如 $[x,y,1]$。射影平面中的其他点形如 $[x,y,0]$,并且对应于位于 $xy$-平面中的直线。这些点有时被称为“无穷远点”,因为这样的点是欧几里得平面中无界的点序列的极限。
如果我们采用齐次坐标,我们可以将我们的变换写成 $$ [x,y,1]\mapsto [u,v,1] = [ax+by+c, dx+ey+f, gx+hy+j],$$
每个分量都是线性的,我们将看到,这带来了极大的方便。确定变换需要我们确定由常数 $a, b,\ldots, j$ 形成的矩阵。然而,由于使用齐次坐标,相差标量倍数的两个矩阵相同。 |
|





 ,见
,见

